
Will Curiosity outlast Opportunity, the rover it was designed to supersede? Or will it fail, since it’s too big for its britches?
“By refocusing our space program on Mars for America’s future, we can restore the sense of wonder and adventure in space exploration that we knew in the summer of 1969. We won the moon race; now it’s time for us to live and work on Mars, first on its moons and then on its surface.” – Buzz Aldrin
In 2003, the twin Mars rovers, Spirit and Opportunity, were launched to the red planet, intended to investigate our fascinating neighbor for 90-Martian-day missions apiece. The over-engineered rovers shattered those expectation, with Opportunity still going after more than 4500 Martian days, or 12 Earth years. Curiosity, the next generation of Mars rover, landed on Mars back in August of 2012, and it was much better equipped than its predecessors. With more instruments, a radioisotope power source (rather than solar panels), a variety of cameras and robotic arms and a total of nearly-a-ton of exploration power on board, it’s by far the largest, heaviest mobile and self-directed vehicle ever landed on another world. A new thruster-based landing system set it down gently, wheels-first, and it’s been doing its thing ever since. Originally slated for a two-year mission, it’s now doubled that duration, and is still taking amazing data (and pictures) with all of its instruments still functioning.

But there’s a terrible weakness in this 899 kg (1982 lb.) beast that’s very likely going to keep it from accomplishing its main mission: the full exploration of its original target, Mars’ Mount Sharp. It wasn’t merely the fact that it landed 10 kilometers from that target and had to traverse all that terrain just to get there, although that’s true. It isn’t because the radioactive nuclear power is decaying; after 14 years of potential operation, it will still be around 100 Watts of usable power, or 80% of what it was designed to produce at the start of operations. (Initial power production was ~110 W, a bit below the ~125 W it was designed for.) And it isn’t because Mount Sharp is different from what we thought it was when we arrived. Although there have been a whole host of surprises — including dunes, a legacy of liquid water and rockier-than-expected terrain — the ascent of Mount Sharp could still have been within reach by this spectacular behemoth if it weren’t for one fatal flaw.

A chain is only as strong as its weakest link, and in the case of the Curiosity rover, that weak link just might prove to be its wheels. We knew the wheels could be trouble, depending on what we encountered. Before we ever went to Mars, we constructed a stripped-down version of the rover named Scarecrow, and set it to rove across some of the most Mars-like terrain accessible on Earth: in the deserts of California and Arizona.

Scarecrow was devoid of science instruments, but was weighted to perform on Earth exactly as the real Curiosity would perform on Mars. It was driven a great distance over a variety of terrain, including land that was smoother than Mars, sandier than the red planet, as well as rougher, rockier and more dramatically inclined. They tested Scarecrow to the point of failure, and fail it did, indeed. By going over the rockier terrain, its aluminum-strengthened wheels suffered punctures and tears, which eventually led to the wheels becoming entirely shredded.

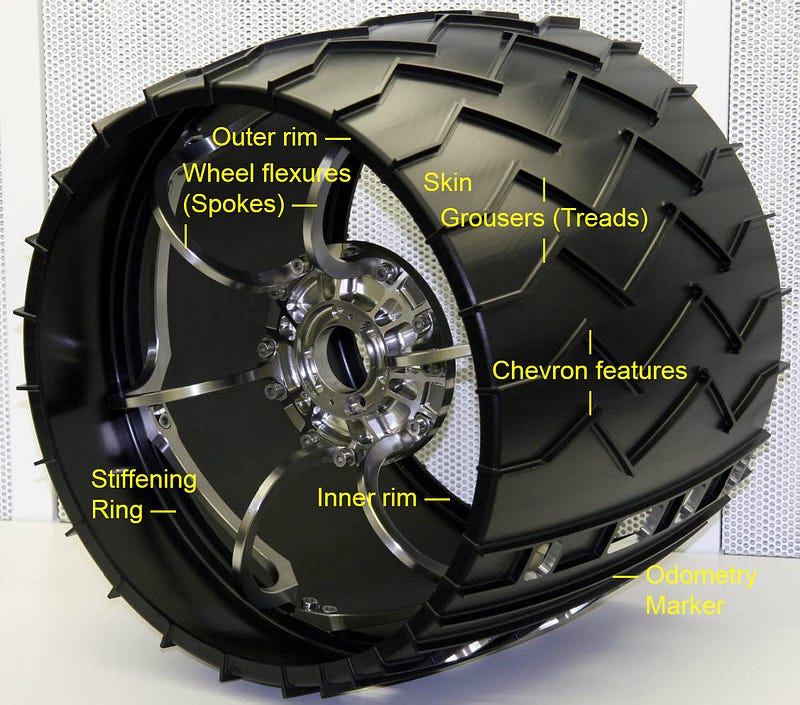
The terrain on Mars was supposed to be smoother than the failure-causing ground here on Earth, and the wheels were supposed to be up to the challenge. In order to save on weight and to keep the wheels as strong as possible, each one of the six Curiosity wheelskins was machined from a single, solid block of aluminum, to a thickness of just 0.75 millimeters apiece, with the treads ten times as thick. Clearly, the thinnest parts are going to be most susceptible to punctures and tears, which is exactly what the Scarecrow test vehicle encountered.
But beginning on Sol 411, or the 411th Martian day on Mars (corresponding to the 422nd Earth day), we started seeing the same problems on the real Curiosity rover: the one on Mars. Landing 10 km from Mount Sharp didn’t help — that was still a pretty precise touchdown — but the real culprit was that the rockier-than-expected terrain punched holes in the rover wheels. In particular, the front and middle wheels took the most damage, and now have permanent holes in them.
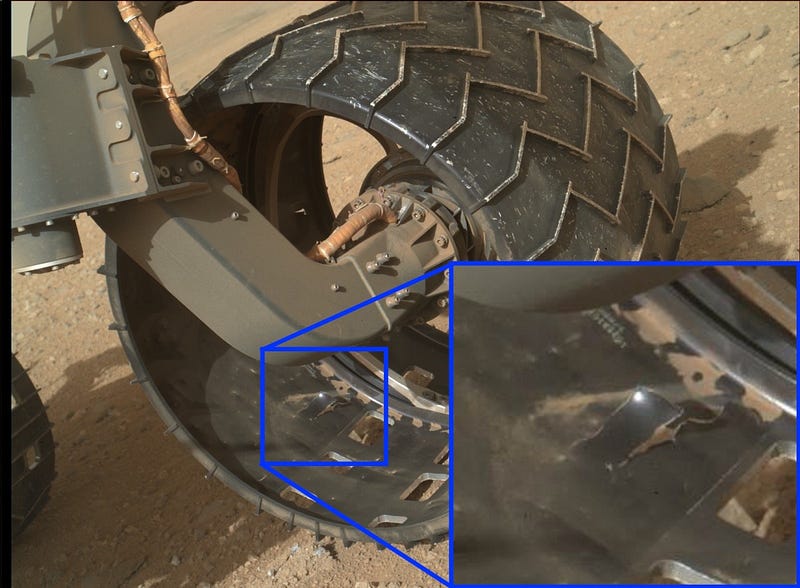
This damage has worsened over time, which was initially a bit of a puzzle. After all, despite the presence of sharp, pointy rocks, even a full 1/6th of the rover’s weight slamming down on it wouldn’t be sufficient to drive a hole into it. But a combination of two factors:
- continued travels over Martian bedrock has made the wheels softer, like bending a thin piece of metal back-and-forth many times,
- and the fact that the orientation of the rover can “slam” much more than one-sixth of the total weight into the front or middle wheels,
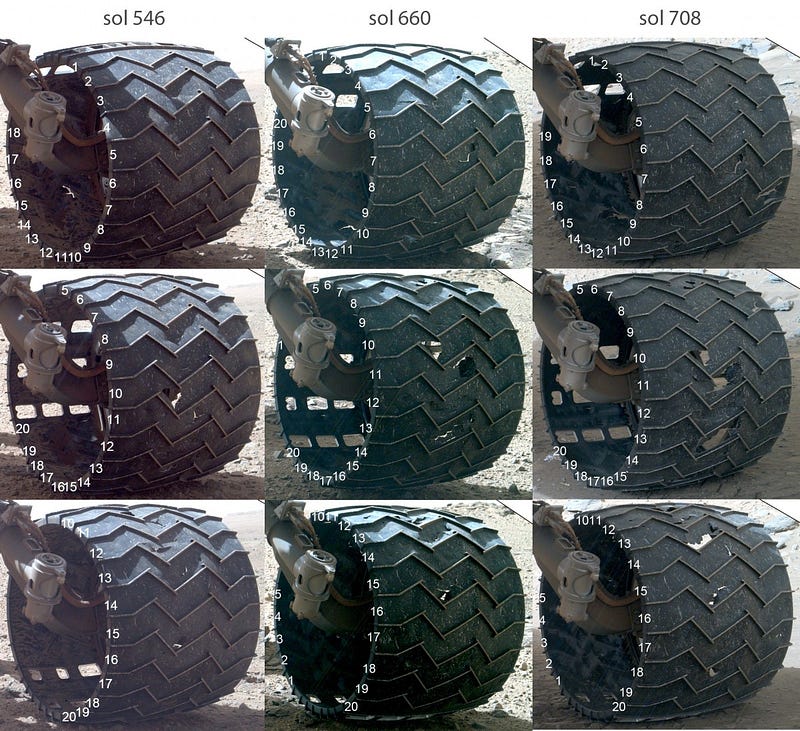
have come together to result in these puncture wounds in the centers of the wheels. Moreover, as the rover continues to drive, these wounds and tears become worse.
But there’s good news mixed in here, too! First off, even with the shredded wheels, the Scarecrow rover was still functional on Earth. The wheels may have looked abominable, but the fact of the matter is it still drove. According to scientist (and lead driver for Curiosity) Matt Heverly:
We have driven Scarecrow about 12 kilometers (7.5 miles) in the Marsyard over rocks and slopes much harsher than we expect for Curiosity. There are some dents and holes in these wheels, but the rover is still performing well. We will continue to characterize the wheels both on Mars and in the Marsyard, but we don’t expect the wear to impact our ability to get to Mt. Sharp.
But even more importantly, there’s a technique the Curiosity scientists are using to maximize the life of what they have: driving slower and driving backwards! The slow pace might be frustrating to those of us eager for the science, but driving at half speed over the same distance means only onequarter of the wear on the wheels. But going backwards is the real innovation. The damage was exclusively to the front and middle wheels, meaning that the rear wheels aren’t as susceptible to this type of damage. By driving in the backwards direction, the rear wheels take the brunt of the force, sparing the front wheels further damage. What this means is that the middle wheels will likely be the ultimate point of failure, although they’re all still in far better shape than any of the Scarecrow wheels were.

The Curiosity rover arrived at Mount Sharp in September of 2014, and has been exploring and ascending it — slowly — ever since. The wheels are certainly the weakest point of the rover and are likely to be the ultimate source of its failure: its Achilles wheel, if you will. There was a good reason for the thin aluminum, as even making them even one millimeter thicker would have added a kettlebell’s worth of weight, and the novel landing was made possible by the light, thin wheels.
With Mars Rover 2020 coming up, scientists have been steadily and diligently investigating superior technology and techniques for the next generation of rover wheels, with no clear frontrunning design as of yet. What we’re learning is so incredible, not just about other worlds, but how to survive, thrive and sustain our technology in that environment. We’ve already come so far, and even these “failures” take us further in our understanding. The next steps are up to us!
This post first appeared at Forbes, and is brought to you ad-free by our Patreon supporters. Comment on our forum, & buy our first book: Beyond The Galaxy!